

Monk Makes Animatronic Head Kit for the BBC micro:bit
This kit provides everything you need to make a talking animatronic head. Its eyes move and the head speaks from a Monk Makes Speaker for the BBC micro:bit. Software The programs...
Required products - sold separately


This kit provides everything you need to make a talking animatronic head. Its eyes move and the head speaks from a Monk Makes Speaker for the BBC micro:bit.
Software
The programs for this project are a mixture of Makecode blocks and MicroPython. MicroPython is needed for some projects as the speech module is not available as blocks code and its nice to have the robot talk.
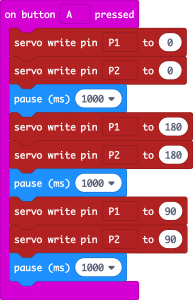
Program 0. Eyes Front
Click on the image below to open the program ready to flash it onto your micro:bit.
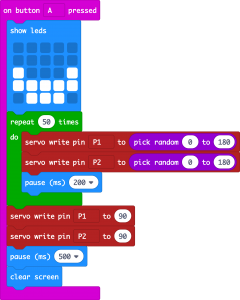
Program 1. Crazy Eyes
Click on the image below to open the program ready to flash it onto your micro:bit.
Program 2. Robot Beeping
Click on the image below to open the program ready to flash it onto your micro:bit.

Program 3. Talking Head
Click HERE to open the online Python Editor delete the example text in the editor window and then copy and paste the following code into the editor window.
import random, speech
sentences = [
"Hello my name is Mike",
"What is your name",
"I am looking at you",
"Exterminate exterminate exterminate",
"Number Five is alive",
"I cant do that Dave",
"daisee daisee give me your answer do"
]
lips0 = Image("00000:"
"00000:"
"99999:"
"00000:"
"00000")
lips1 = Image("00000:"
"00900:"
"99099:"
"00900:"
"00000")
lips2 = Image("00000:"
"09990:"
"99099:"
"09990:"
"00000")
lips = [lips0, lips1, lips2]
def set_servo_angle(pin, angle):
duty = 26 + (angle * 51) / 90
pin.write_analog(duty)
def speak(sentence):
words = sentence.split()
for i in range(0, len(words)):
display.show(random.choice(lips))
speech.say(words[i])
display.show(lips0)
def act():
angle = random.randint(0, 180)
set_servo_angle(pin1, angle)
set_servo_angle(pin2, angle)
sleep(300)
speak(random.choice(sentences))
set_servo_angle(pin1, 90)
set_servo_angle(pin2, 90)
sleep(1000)
base_z = 0
while True:
new_z = abs(accelerometer.get_z())
if abs(new_z - base_z) > 20:
base_z = new_z
act()
if random.randint(0, 1000) == 0: # say something 1 time in 1000
act()
sleep(100)
Find your BBC micro:bit Project Kit & Accessories here!
You can do a lot with a BBC microbit but you can do so much more when you combine it with a microbit project kit and accessories. We've carefully selected project kits and accessories from world leading manufactures including 4tronix, DF Robot, Elecfreaks, Kitronik, Monk Makes , Seeed and Sparkfun to create a one stop shop for you.
To help you find the perfect microbit project for your students or the vital missing component to finish your microbit project we've sorted our extensive range of BBC micro:bit projects and accessories into sub-categories. Click on a sub-category and then use the filters to narrow your search even more.
Can't find what you're looking for? Chat With Us online, send us an email call us on 1800 634 050 our expert staff are standing by to help you.